Acknowledgements
Engineering Design with NI LabView High School Robotic Activities
objectives
Students will be able to describe the engineering design process.
Construct a two motor robot. Go to nxt constuctopedia.com for instructions.
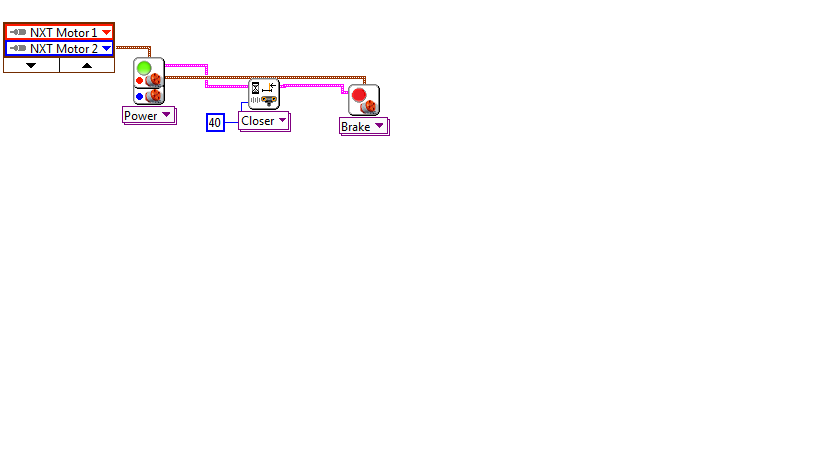
Use Labview to program a robot to move a specified distance.
http://prezi.com/xdvjuksynto9/?utm_campaign=share&utm_medium=copy
Vocabulary
Autonomous vehicle
block diagram
virtual instrument
prototype
front panel
Robot requirements
Robot can carry a 5oz paper cup full of lego pieces.
Robot can move without the cup dropping the lego pieces.
Robot can drive to a specified distance
Reflections (Engineering Design Common Assessment)
1. State the assignment (problem/project) in your own words.
2. What are your input factors? (What do you need to know or do before you can begin?) Include the research you did.
3. Describe the process in detail. Explain the steps you followed in order to complete the project.
4. Describe the final output / product in detail: (what are we looking at?)
5. Describe feedback you received during the project (suggestions, comments, etc). From peers, instructor etc.. How did you use this feedback to correct issues with your project?
6. What did you learn during the assignment such as tools, skills, design concepts, software, hardware, etc ? ,
7. If you were to do the project again, what would you do differently and why?
Describe one challenge in building and programming the robot.
Engineering Design Process
| mr._crokes_intellectual_gymnasium.pdf |
|
RUBRIC
|
https://docs.google.com/presentation/d/1SwD9OqPUN1FDe_MQlQbWg_mnnzZwZFWsFWEyKbh7PQk/edit#slide=id.p3
| ||
2014 Robotic challenge 2 Avoid obstacles
Objectives
Students will be able to add a sensor to the robot used in project one
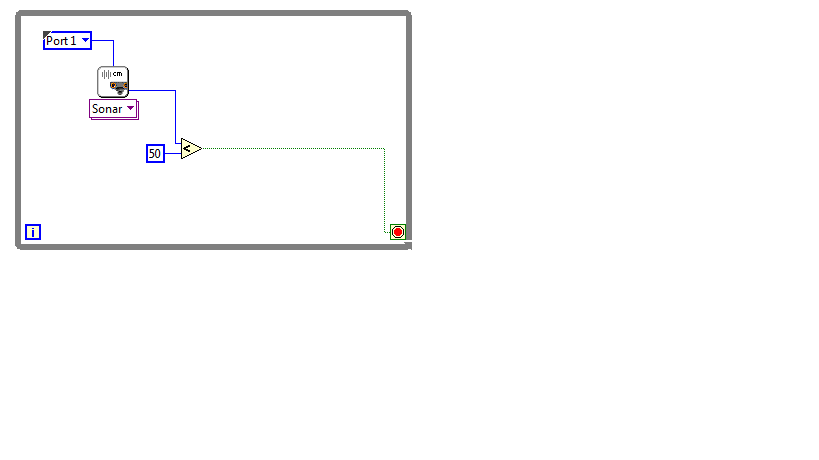
Students will be able to create a labview program that stops the robot when an obstacle is placed in its path
Students will be able to create a labview program that navigates the robot around the obstacle placed in its path.
Students will be able to use Boolean comparison in programming
Students will be able to use loops in programming
.
Students will be able to create a labview program that stops the robot when an obstacle is placed in its path
Students will be able to create a labview program that navigates the robot around the obstacle placed in its path.
Students will be able to use Boolean comparison in programming
Students will be able to use loops in programming
.
http://goanimate.com/videos/0U2nmZhADgBg?utm_source=linkshare&utm_medium=linkshare&utm_campaign=usercontent
Challenge #3 Line following
Design constraints
The students will be able to use the data viewer.
The students will be able to use the light sensor to develop a computer program to follow a line
The student will be able to integrate a touch sensor into the program for obstacle avoidance.
The student will be able to use program loops.
- The robot must contain a light sensor
- The robot must contain a touch sensor
- The robot follows a 5 foot line
- The robot stops when it encounters and obstacle
- The robot must carry a Dixie cup full of legos without the cup tipping over
The students will be able to use the data viewer.
The students will be able to use the light sensor to develop a computer program to follow a line
The student will be able to integrate a touch sensor into the program for obstacle avoidance.
The student will be able to use program loops.
Ramp Bot Challenge
Design, build and program a robot to climb the steepest incline possible. Think about friction, mass and torque. Use the engineering design process to help solve this challenge. Use LabView to help program your robot and to solve the required problems.
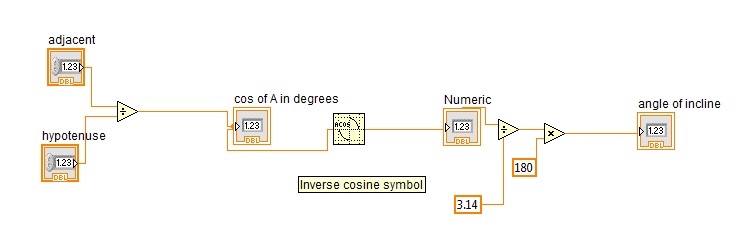
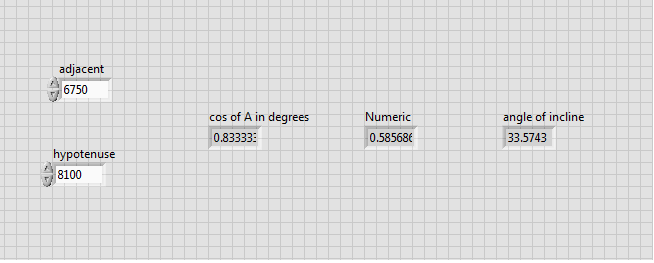
Calculate the angle
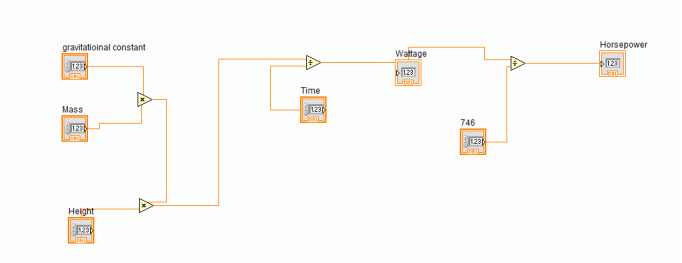
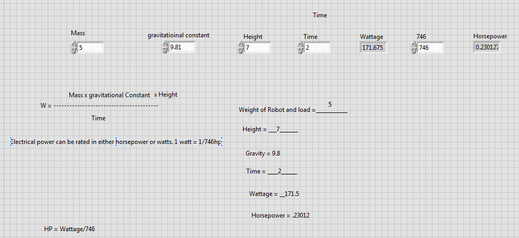
Calculate horsepower
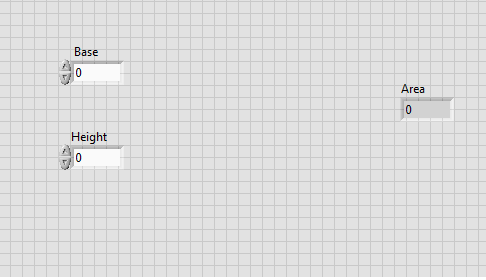
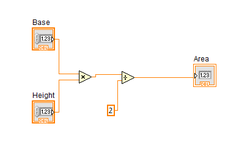
Area of Triangle
Quick check list
Does your website tell what you did for all 8 steps of the engineering design process?
Does your website contain pictures that show the evolution of your your robot?
Does your website have a video of your robot climbing the ramp?
Did you use labview to solve for:
Does your website tell what you did for all 8 steps of the engineering design process?
Does your website contain pictures that show the evolution of your your robot?
Does your website have a video of your robot climbing the ramp?
Did you use labview to solve for:
- angle of incline
- horsepower
- area of triangle
- Is you robotic kit organized?
